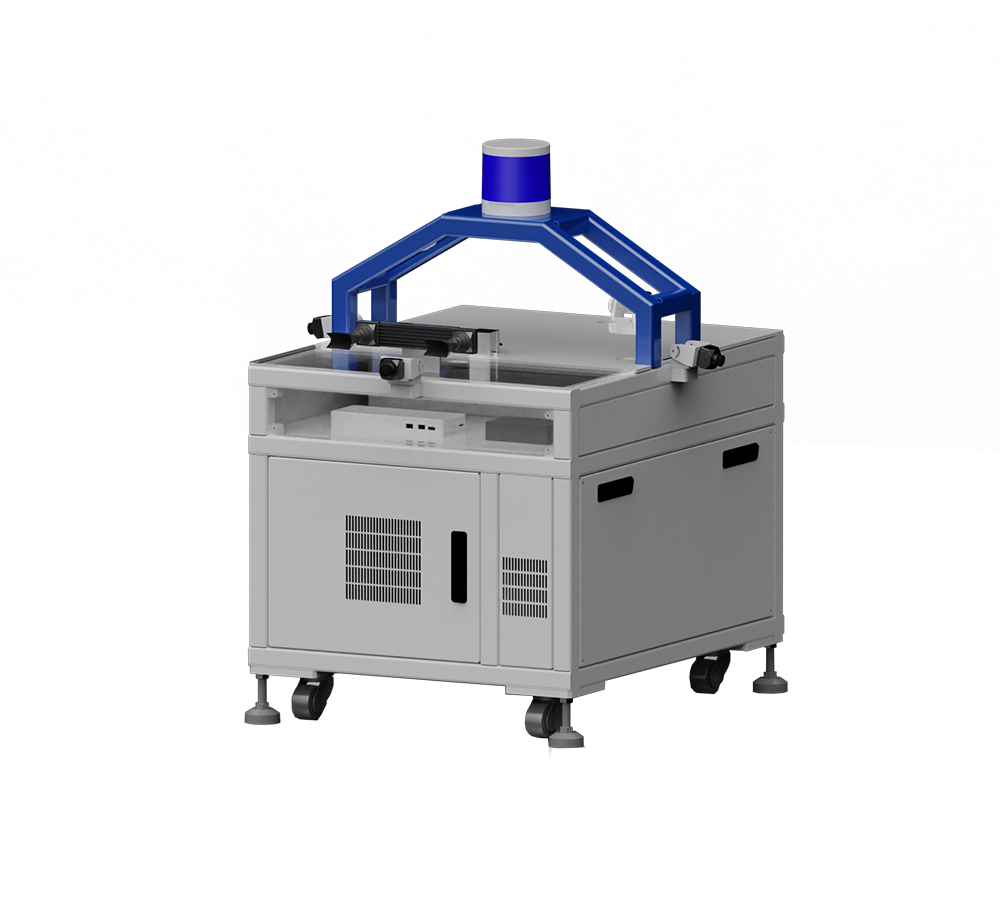
Vision-Radar Multi-Modal Perception System
ALG-TECH introduces the Vision-Radar Multimodal Perception System, which integrates the spatial modeling capabilities of binocular stereo vision with the high-penetration detection advantages of radar to build real-time multimodal environmental perception capabilities. Powered by a deep learning algorithm engine, it utilizes neural networks to achieve high-precision visual relocalization, obstacle detection, map building, and other functions, enabling autonomous positioning without reliance on GPS. This system is applicable to intelligent rail transit, auxiliary safety, and navigation systems for mobile unmanned vehicles.